Norilsk 15. júla 2016 (HSP/Sputnik/Foto:Boomstarter)
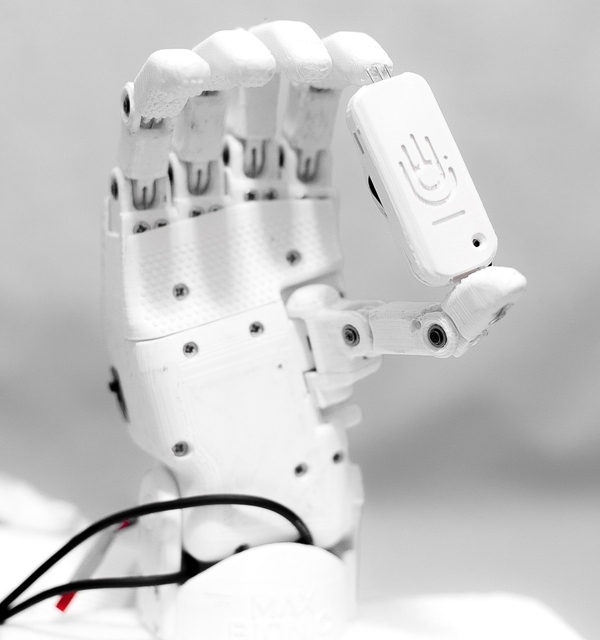
Pred troma rokmi prišiel 28-ročný Maxim Ljaško z Norilsku o pravú ruku pri práci na šachte. Pociťoval všetky prekážky človeka, ktorý prišiel o končatinu, preto sa Maxim rozhodol sám vyvinúť bionickou protézu ruky
Ljaškov projekt sa volá MaxBionic. Spoločnosť, ktorá zhromažďuje prostriedky na jeho rozvoj, štartovala na ruskej crowd-fundingovej platforme Boomstarter 30. mája. Cieľom je nazbierať 1,5 milióna rubľov pre rozvoj opensourcovej verzie protézy, ktorú si bude možné vytlačiť na domácej 3D-tlačiarni. Protéza od MaxBionic nebude stáť viac ako tisíc dolárov, najlepšie importované protézy stoja podľa informácií Ljaška od 25 tisíc do 250 tisíc dolárov.
Zbieranie peňazí na Boomstarteri pravdepodobne skončí neúspešne – projekt zhromaždil okolo 500 tisíc rubľov, pričom do konca zostáva iba 15 dní. Ljaško povedal, ako sa bude projekt ďalej rozvíjať:
„Teraz som pristúpil k príprave tretieho typu protézy, kovovej – to bude sériový model. Bez batérie váži presne 400 gramov. Protéza má vlastnú riadiacu dosku.“ Aby zlacnil technológiu jej tvorby, plánuje v júli-auguste vyvíjať vlastný elektromyografický vysielač. „Nebudeme využívať zahraničné komponenty – akýkoľvek z nich prudko zvyšuje cenu. Napríklad jeden nemecký motorček stojí 150-300 dolárov. Ak ich potrebujeme päť, už máme jeden a pol tisíc dolárov. Pohon, ozubené kolesá – všetko je naše.“
Zmysel opensourcového projektu spočíva v tom, aby si človek mohol v domácich podmienkach s využitím minima zariadení vyrobiť protézu. Čo sa týka sériových jednotiek, budú sa používať technológie priemyselnej výroby. Je prirodzené, že v domácom prostredí nie je možné vyrobiť sériový model. To znamená, že to vo svojej podstate budú dva projekty s rôznymi charakteristikami.
„Sprevádzkovanie protézy trvá okolo desiatich minút. Urobil som svoje programové zabezpečenia, ktoré sa inštalujú do počítača. Zahraničné analógie nemajú svoj operačný systém, obyčajne pracujú cez terminál. Ja som vytvoril špeciálny program, ten má svoje grafy, ktoré reflektujú vysielač a s ich pomocou je veľmi pohodlné protézu uvádzať do prevádzky, konkrétne sa jedná o hľadanie miest na ruke, kam ustanoviť vysielač. V protéze je motor, ktorý s ňou hýbe. Čím rýchlejšie pracuje, tým vyvíja slabšiu silu. Čím pomalšie pracuje, tým vytvára väčšiu silu. Keď som vytváral druhý prototyp, tak som akcentoval silu.“
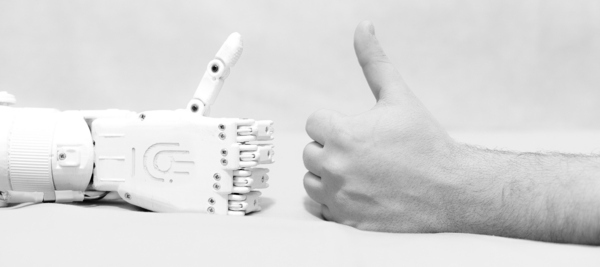
!Protéza však nie je živá ruka. Zdravý človek robí stovky pohybov bez toho aby si to všímal, to sa deje intuitívne. Je dôležité chápať, že ovládanie protézy nie je napojené na mozog, preto nie je možné pohybovať jednotlivými prstami. Čím hladšie protéza pracuje, tým ľahšie je s ňou pracovať. Keď je príliš rýchla, ľudia často minú, nemôžu uchytiť predmet. Je lepšie niekoľko sekúnd počkať a vykonať kvalitný úchyt na prvý pokus.“
„Pri konštrukcii protézy som vychádzal zo svojich pocitov človeka bez ruky a opieral som sa o skúsenosť ľudí, ktorí protézy priamo využívajú, nie o zdravých ľudí, ktorí jednoducho pozerajú na video a chcú, aby pracovala rýchlo.“